
6-DoF Pose Estimation
Developed a real-time computer vision system for robotic manipulation using NVIDIA's DOPE algorithm and Isaac ROS 2. As the lead researcher, implemented end-to-end pipeline from RGB camera input to 6-DoF pose estimation, achieving sub-5cm accuracy suitable for robotic grasping. Conducted comprehensive evaluation using industry-standard metrics with ground truth validation from optical tracking systems, demonstrating practical viability for autonomous manipulation applications.
ROS 2 on Linux
·
Coordinate Transformations
·
Model Validation & Testing
·
Computer Vision
·
ROS 2 on Linux · Coordinate Transformations · Model Validation & Testing · Computer Vision ·
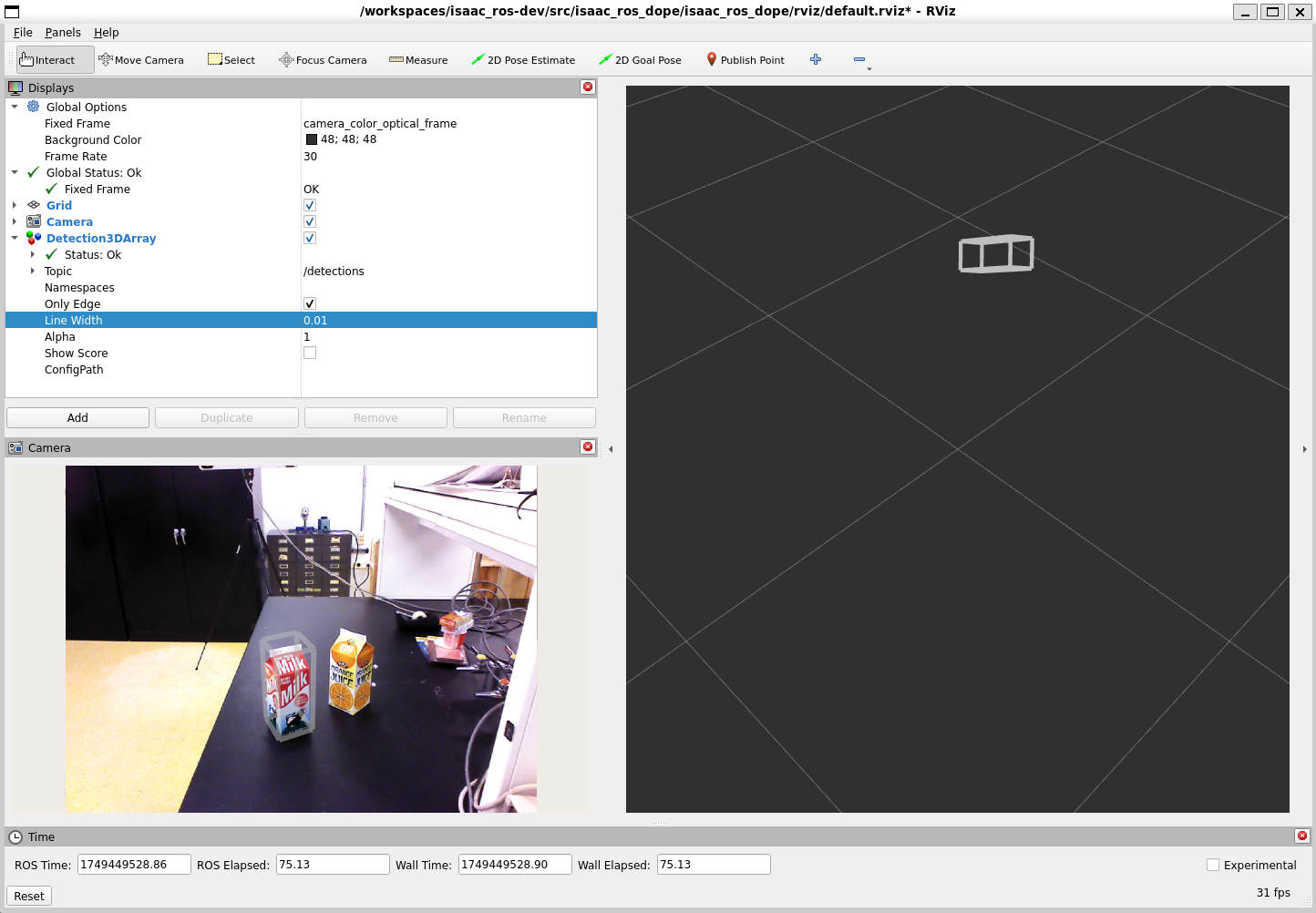
Model Inference in Rviz2 on ROS2
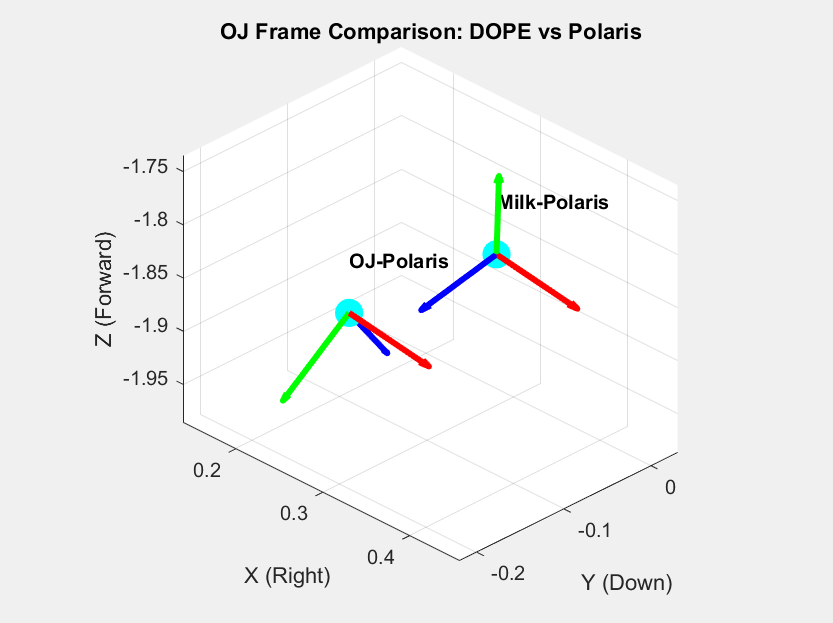
Quaternions visualized in MATLAB
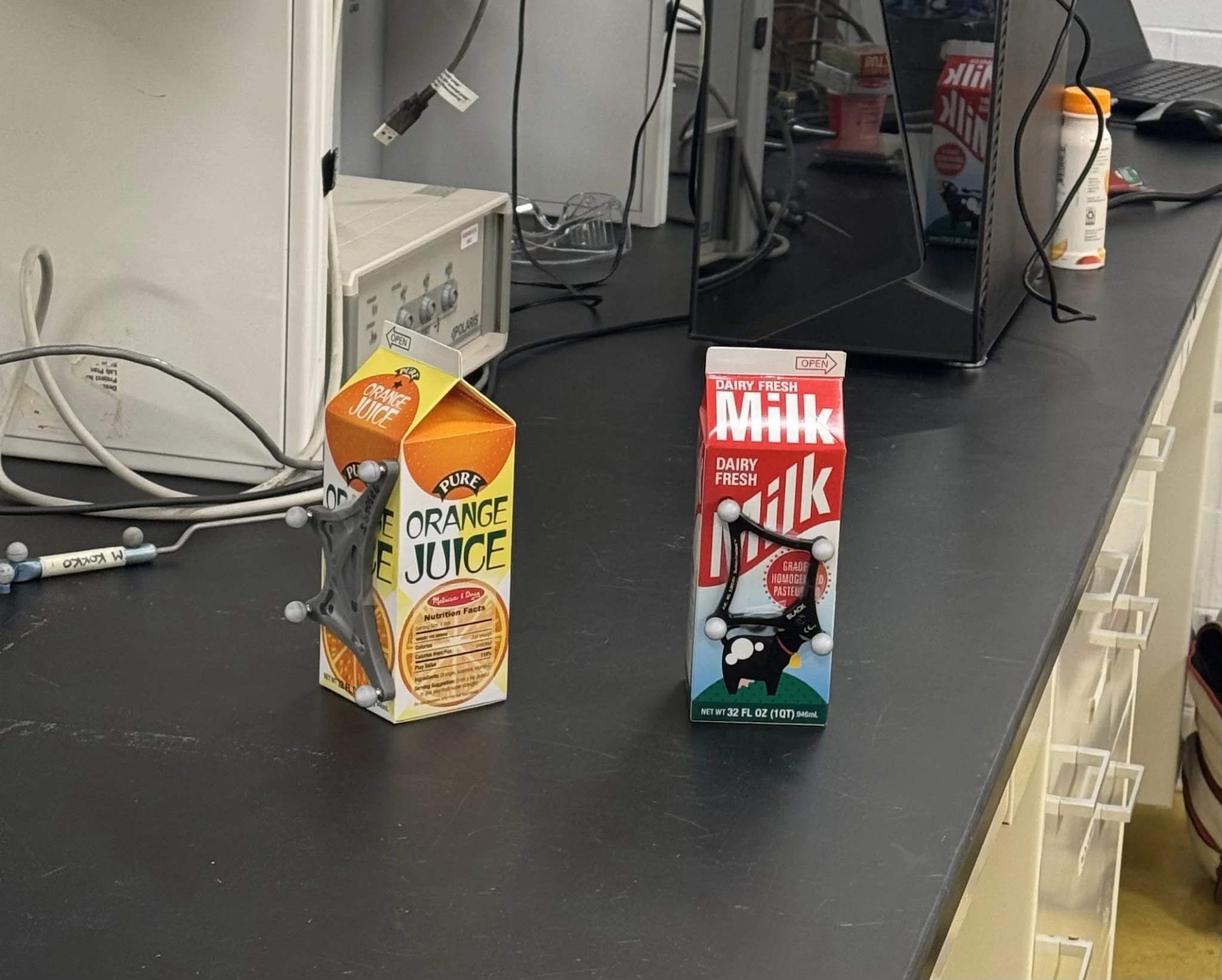
Optical Tracker POV for ground truth

RGBD Camera POV for model inference